

Distributed learning based Intelligent Transportation System
1. Distributed Traffic Signal Control for Optimized Urban Mobility
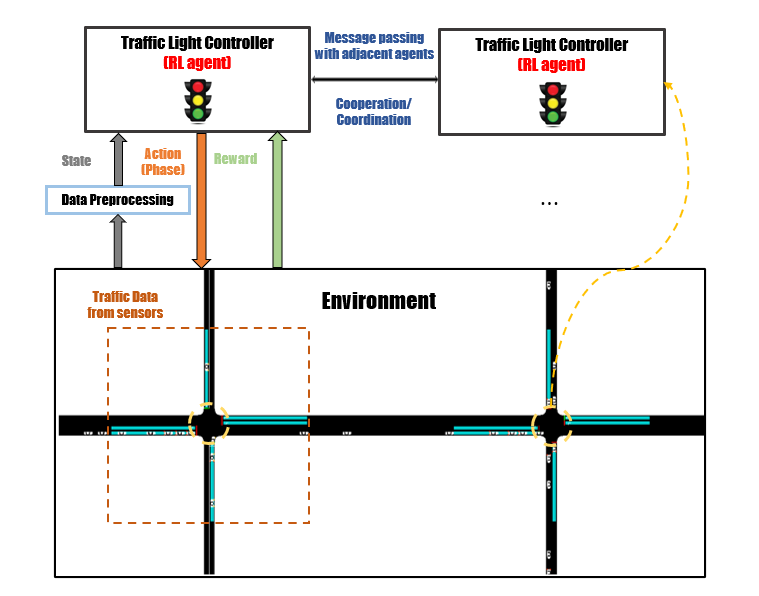
Recent advances in robotics, artificial intelligence and sensing are bringing us closer to the systematic replacement of most human-driven cars by autonomous driving vehicles. However, intelligent cars will require novel intelligent traffic coordination methods, which will likely need to be enacted on the infrastructure side (e.g., traffic signals such as traffic lights at road junctions). Centralized control of the traffic infrastructure is infeasible, in large metropolis that can count upwards of thousands of junctions, and decentralization will be necessary.
In this project, we aim to develop novel methods to control the traffic signals at each homogeneous junction to manage flow-level dynamic traffic demands, based on that junction’s real-time traffic conditions (number and speed of incoming vehicles, queue lengths, waiting times, etc.) as well as the conditions of adjacent junctions. In particular, this project looks to distributed reinforcement learning approaches to tackle such a complex problem, by identifying each junction (or each traffic light) with a learning agent and allowing the resulting agent society to collaboratively/cooperatively optimize traffic conditions throughout the city, yet via local sensing/action. In the longer-term, this project also seeks to consider more complex cases such as signal duration control, vehicle breakdowns/accidents, green waves, pedestrian traffic optimization etc.
2. Scalable and Decentralized Urban Traffic Management for Autonomous Vehicles

Connected autonomous vehicles (CAVs) hold immense potential to revolutionize public and industrial transport by offering significant benefits such as enhancing road safety, alleviating traffic congestion, and reducing pollution and energy consumption. However, the successful integration of connected vehicles into existing transportation networks continues to pose a challenge, contingent upon the existence of a comprehensive management system that enables real-time message sharing between vehicles and vehicles (V2V), vehicles and infrastructures (V2I), as well as intelligent fleet management for CAVs. Facilitating efficient coordination among CAVs and other entities within intersections (such as human-driven vehicles, traffic lights, and pedestrians) is also crucial to improving the operational efficiency while ensuring safety and reliability.
To both support and prepare for this challenge, this project seeks novel, improved AI-based methods to allow intelligent agents (e.g., CAVs or traffic lights) to cooperatively plan trajectories and traffic light signals in a mixed mode environment that is partially observable, and under a decentralized setting. The objective is to collectively optimize traffic conditions towards a social optimum, based on local communications and real-time reactive planning. Specifically, we are interested in developping advanced communication learning methods to achieve targeted communication and efficient message passing by learning what and how to communicate among intelligent agents. Furthermore, the project aims to address more intricate scenarios in the longer term, such as communication restrictions or interruptions during operation, mixed autonomy management, and autonomous intersection management (including signal-free intersections exclusively for CAVs).
Related recent publications:
- SocialLight: Distributed Cooperation Learning towards Network-Wide Traffic Signal Control
- Distributed Model Predictive Control of Connected Multi-Vehicle Systems at Unsignalized Intersections
- “Multi-Agent Traffic Signal Control via Distributed RL with Spatial and Temporal Feature Extraction,” found in the public proceedings of the ABMUS Workshop at AAMAS 2022.
Related prior projects:
- Multi-robot path planning in factory-like environments
- PRIMAL: Pathfinding via Reinforcement and Imitation Multi-Agent Learning
People

Guillaume SARTORETTI

Yifeng ZHANG

Mingfeng FAN
