
![]()
Welcome to the Multi-Agent Robotic Motion Laboratory!
Message to Prospective Students and Postdocs
Try our Online Interactive PRIMAL Demo!
News
-
January 31, 2026
ICRA 2026 - Two Papers Accepted
Our paper focusing on learning-based, autonomous exploration of unknown spaces under motion constraints has been accepted for presentation at the IEEE International Conference on Robotics & Automation (ICRA 2026), which will be held 1-5 June 2026 in Vienna, Austria.
Read more » -
January 30, 2026
ANTS 2026 - Paper Accepted
Our paper focusing on diffusion-policy-based intent generation and cooperative multi-agent informative path planning has been accepted for presentation at the 15th International Conference on Swarm Intelligence (ANTS 2026), which will be held 8-10 June 2026 in Darmstadt, Germany.
Read more » -
January 26, 2026
ICLR 2026 - Paper Accepted
Our collaboration paper with Prof. Mac Schwager’s team (Stanford) on the limitations of diffusion policies for robotic manipulation tasks has been accepted for publication at the Fourteenth International Conference on Learning Representations (ICLR 2026), which will be held 23-27 April 2026 in Rio de Janeiro, Brazil.
Read more » -
January 12, 2026
Robotics and Automation Letters - Paper Accepted
Our paper focusing on scalable ultra-large-scale deployment of MAPF plans has been accepted for publication in IEEE Robotics and Automation Letters (RA-L).
Read more » -
December 11, 2025
IEEE Transactions on Intelligent Transportation Systems - Two Papers Accepted
Our papers focusing on general network-wide cooperative multi-agent traffic signal control, as well as lane selection and sequencing for autonomous freeqay merging, have been accepterd for publicationm in IEEE Transactions on Intelligent Transportation Systems.
Read more » - December 05, 2025
-
September 19, 2025
NeurIPS 2025 - Paper Accepted
Our paper focusing on Learning-based, Multi-Objective Combinatorial Optimization has been accepted for presentation at the Thirty-Ninth Annual Conference on Neural Information Processing Systems (NeurIPS 2025), which will be held 2-7 December 2025 in San Diego, California, USA (and collocated in Mexico City, Mexico).
Read more » -
August 01, 2025
CoRL 2025 - 4 Papers Accepted (including one for Oral presentation)!!
The lab has been extremely fortunate this year, with 4 papers accepted to the prestigious Conference on Robot Learning (CORL 2025), which will take place 27-30 September 2025 in Seoul, Korea. Two of these papers are the result of international collaborations, borne from student visits at other universities.
Read more »

Current Research Projects
See some of my past projects on my (old) personal webpage.

Vision-Language-Action Foundation Models for General Embodied Intelligence
Embodied AI uses Vision-Language-Action models to connect perception, language, and action, aiming to build general robots that can adapt, reason, and perform complex tasks in real-world environments.





Decentralized Collision-Free Multi-Agent Path Finding (MAPF)
Distributed reinforcement learning for scalable, decentralized multi-agent path finding in highly-structured environments (e.g., Amazon fulfillment centers)






Communication Learning for True Cooperation in Multi-Agent Systems
Communication learning for simultaneous communication and action policy learning.

")
")


Autonomous Robotic Exploration and Search in Complex Environments
Deployment of robots to conduct efficient exploration and search in complex environments






Multi-Agent Search/Surveillance of Adversarial/Evasive Agents
Multi-robot search and monitor an area to locate potentially evasive targets, by learning strategies in a mixed cooperative-competitive environment.
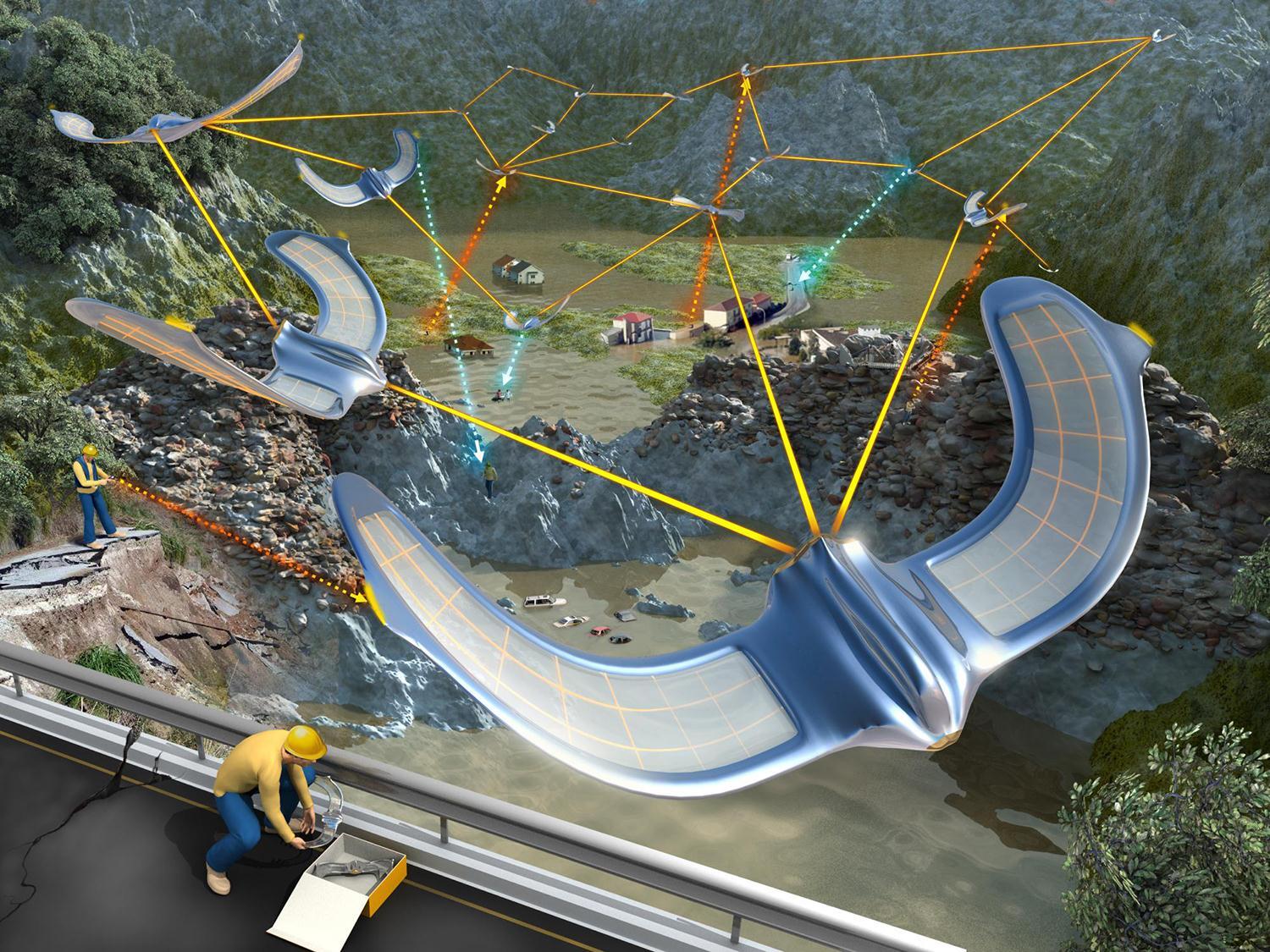
Communication-Aware Multi-Agent Exploration
Decentralised multi-robot exploration in communication-constraint environments, ensuring appropriate connectivity and adaptability in real-world conditions.
")



Distributed learning based Intelligent Transportation System
Distributed RL for junction-level traffic light phase control, as well as for decentralized CAVs control via communication learning.




Learning Multi-Agent Strategies
Extension of Model-based Skills Learning to the Multi-Agent Reinforcement Learning Setting.


Environmental Interactions by Autonomous (Legged, Aquatic) Robots
The project’s aim is to exploit this manipulative prowess in order to boost the performance of legged robots in both industrial and real-world situations.





People
PhD Students
Junkai LU
Jimmy CHIUN
Peizhuo LI

Joshua Taylor
Tanishq DUHAN

Jie CHEN

Shivam SOOD
William TEO
Master's Students
Jeric LEW

Xinrong YANG

Meng Pei HENG
